 |
Simple Harmonic Motion Simple harmonic motion is a special type of periodic motion where the restoring force on the moving object is directly proportional to the object's displacement magnitude and acts towards the object's equilibrium position. It results in an oscillation which, if uninhibited by friction or any other dissipation of energy, continues indefinitely.
SHM is an important topic because it describes mathematically the natural vibrations we see everywhere around us. If you 'disturb' a branch on a tree or a spider suspended on his web, the 'rocking motion' you observe is SHM - the system exhibits shm as the natural foces ply to restore the equilibrium you disturbed with your 'driving force'. Lots of natural systems exhibit SHM - bouncing, swinging, vibrating things are all usually moving in SHM: from atomic vibrations to suspension bridges! It is therefore an important topic for engineers. The characteristic features of simple harmonic motion
This is like circular motion where the acceleration is towards the centre of the circular path. See this page for more on the similarity between SHM and circular motion.
Graphical and analytical treatmentsUnderstanding and use of the following equations:
The characteristic features of simple harmonic motion are summed up in the first equation (NB you must always mention both characteristics!)
a= -w2xa = - (2pf)2x
The constant of proportionality is w2 A strange constant you may think! .... but, in order to understand where it comes from we have to do a bit of mathematical analysis. w is the angular velocity of the circular motion that corresponds to the SHM. It is equal to 2pf where f is the frequency of the sinusoidal waveform that is associated with SHM. (See how SHM relates to circular motion).
Well, no, not really, the motion is still SHM... But the mathematical desription of the motion will alter depending on where we begin the cycle! If we time from the centre of the oscillation (where x=zero at time t=0s) we get a sine curve to describe the displacement as time varies, if we time from a point where x=A (maximum displacement) we get a cosine curve, but either way, after a bit of mathematical analysis, we get rid of the original trig function for displacement and get 'a' in terms of 'x' and a constant! Let me show you how: Mathematical treatment 1 (t=0 when x=0)
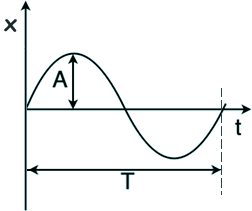
In a graph of displacement against time for a particle exhibiting SHM the amplitude of the graph would be A and the equation would be: x = A sin wt The differential (gradient with respect to time) of this equation would give the velocity 'v'. v = A w cos wt The differential (gradient with respect to time) of this equation would give the acceleration 'a'. a = -A w2 sin wt BUT A sin wt = x so a = -Aw2 sin wt = -w2x Mathematical treatment 2 (t=0 when x=A)
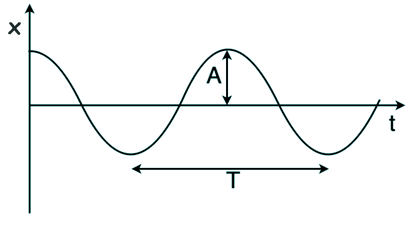
In a graph of displacement against time for a particle exhibiting SHM the amplitude of the graph would be A and the equation would be: x = A cos wt The differential (gradient with respect to time) of this equation would give the velocity 'v'. v = -Aw sin wt The differential (gradient with respect to time) of this equation would give the acceleration 'a'. a = -Aw2 cos wt BUT A cos wt = x so a = -Aw2 cos wt = -w2x BOTH treatments have the same result! Care when tackling questions that you choose the correct trig function - the one in your syllabus - to describe the situation given in the question - look to what is happening when t=0s!!
Note that the equation has acceleration 'a' proportional to the negative value of the displacement' x' (i.e. proportional to the distance (magnitude of the displacement!) but opposite in direction - acceleration increases as it gets closer to the point we are measuring from. The constant of proportionality is linked to the frequency 'f' of the oscillation. Therefore the general equation for SHM could be written: a = - (2pf)2x Now v = - Aw sin wt So v2 = A2w2 sin2wt But sin2wt + cos2wt = 1 so v2 = A2w2 (1-cos2wt) v2 = A2w2 - A2w2cos2wt However we know that: Acoswt = x Squaring this we get: A2cos2wt = x2 Therefore, by substituting it into our equation we get: v2 = A2w2 - w2x2 And taking the square root of this we get: v = +w(A2 - x2)0.5 or You are GIVEN this on the data sheet - you do not have to worry about deriving it - this just shows where it comes from (same thing can be done with the sine expression... try it!) This equation gives the velocity at any displacement x. If it is at the extremities x=A therefore the velocity is zero. At the centre of the oscillation x=0 so v= wA=2pfA (maximum velocity) the +/- indicates the direction of travel. You should be able to sketch the graphs of displacement, velocity and acceleration against time for a system operating SHM. If you start at the point x=0 at time t=0 then the displacement graph will be a sine curve (amplitude A), the velocity a cos curve (amplitude wA) and the acceleration a negative sine curve (amplitude w2A) - where w is 2pf. If you start at a distance A from the point x=0 at time t=0 then the displacement graph will be a cosine curve (amplitude A), the velocity a negative sine curve (amplitude wA) and the acceleration a negative cosine curve (amplitude w2A) - where w is 2pf Exchange of potential and kinetic energy in oscillatory motionThe energy of the system is taken to be constant - made up of kinetic (max at x, where velocity is a max and zero at A because velocity at A is zero) plus potential which has the opposite characteristics of the kinetic.
Graphical representations linking displacement, velocity, acceleration, time and energy
Simple
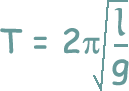
pendulum and mass-spring as examples and use
of the equations:
|
Follow me...
|
 Wow! What a mouthful!...
Wow! What a mouthful!...


Cyberphysics - a web-based teaching aid - for students of physics, their teachers and parents....
